
QR Decomposition Acceleration
Published:
Title: Dual-Triangular QR Decomposition with Global Acceleration and Partially Q-Rotation Skipping
Reference:
Tall and Skinny QR factorizations in MapReduce architectures
Dataflow Systolic Array Implementations of Exploring Dual-Triangular Structure in QR Decomposition Using High-Level Synthesis (HLS version of this article)
My implementation: my_repo
Intro
QR分解在边缘计算, 数据压缩, 降维, 还有特征值计算等方面有着广泛的应用场景,一方面是他的算法并行性很好,比如givens变换一次只对一行数据处理,可以同时处理多行,另一方面是它的数值稳定性好。
在流媒体等边缘任务中,我们遇到的大多是Tall and Skinny Matrix,比如视频中一秒有60帧,但一帧却有百万像素。在这样的矩阵上做QR分解,目标则是把m×n matrix A (m > n)分解成m×n matrix Q with orthogonal columns和n × n upper triangular matrix R。从数学理论上来说,这么分解是可以的,相当于在$R^n$中的m维子空间,m个基组成Q,其余的完全照搬Schmidt正交化,而且相应的数值方法(包括Householder和Givens变换,Schmidt方法)一定也是可以使用的。
但是,如果直接强行做整个Householder或Givens变换,会在边缘平台(FPGA)上带来很大的计算和存储负担,并且也不能很好的并行化,存在大量的同步开销。很自然的,对待这样一个行列数不成正比的矩阵,我们有这样一个最初的并行工作流(communication avoiding QR, CAQR):先将m分成多个n,然后一一分解,最后再组合起来,此时Q并不是显式表示的,而是由一系列矩阵之积表示。
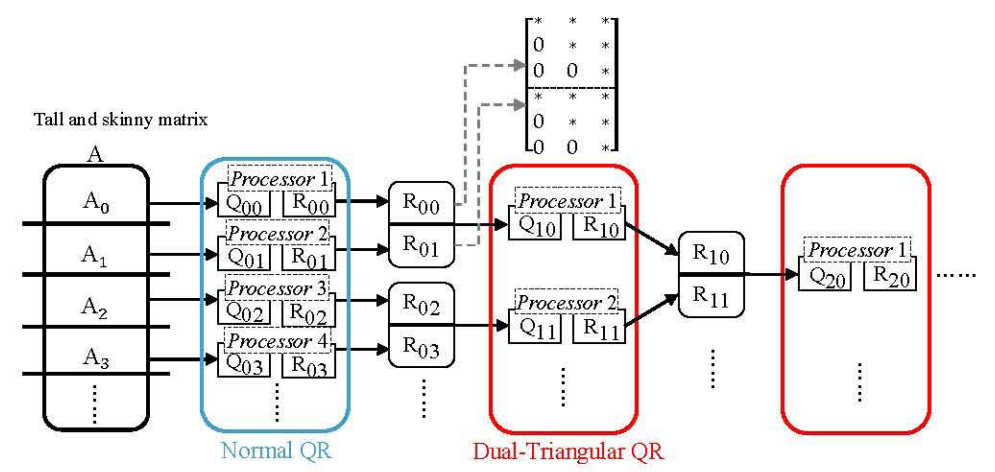
可以发现分解算法由两个基本操作组成:Normal QR和Dual-triangular QR (DTQR)。普通QR已经被很深入的研究过 ,但是DTQR却没有怎么利用他的双三角结构,而是直接用普通QR代替。这一篇文章则是针对这方面做出了优化,采用并行Givens变换来加速计算(Householder是串行算法,是对整个矩阵运行,而Givens一次只计算两行,可以大量并行)。
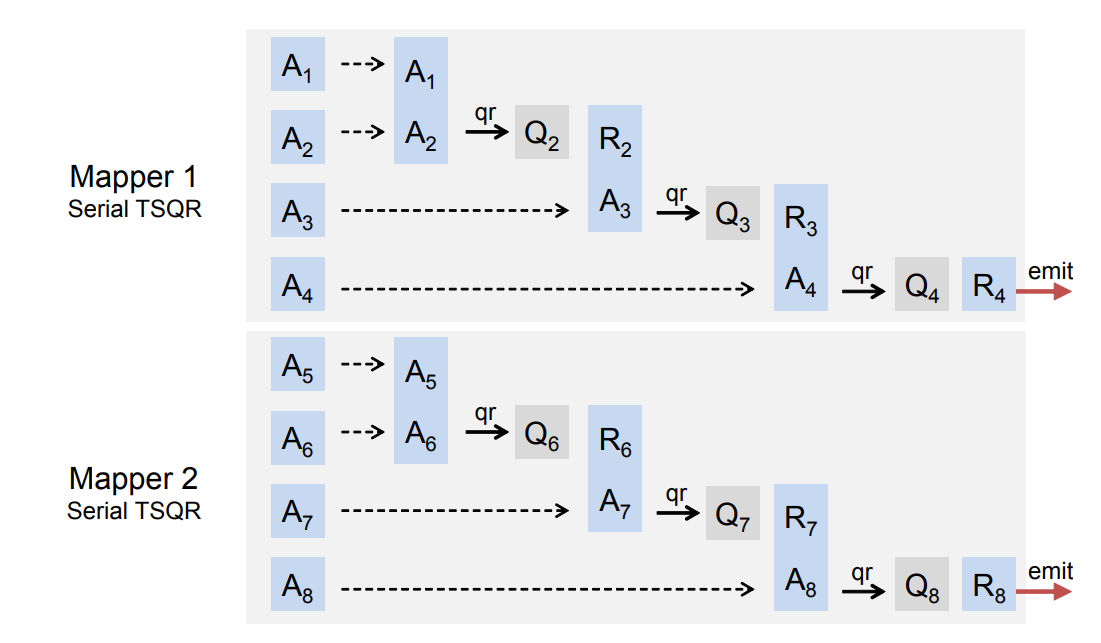
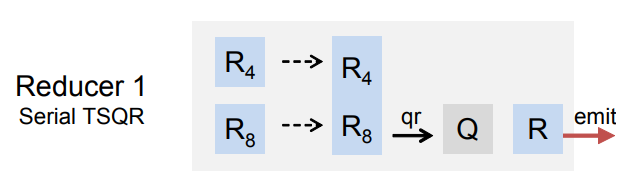
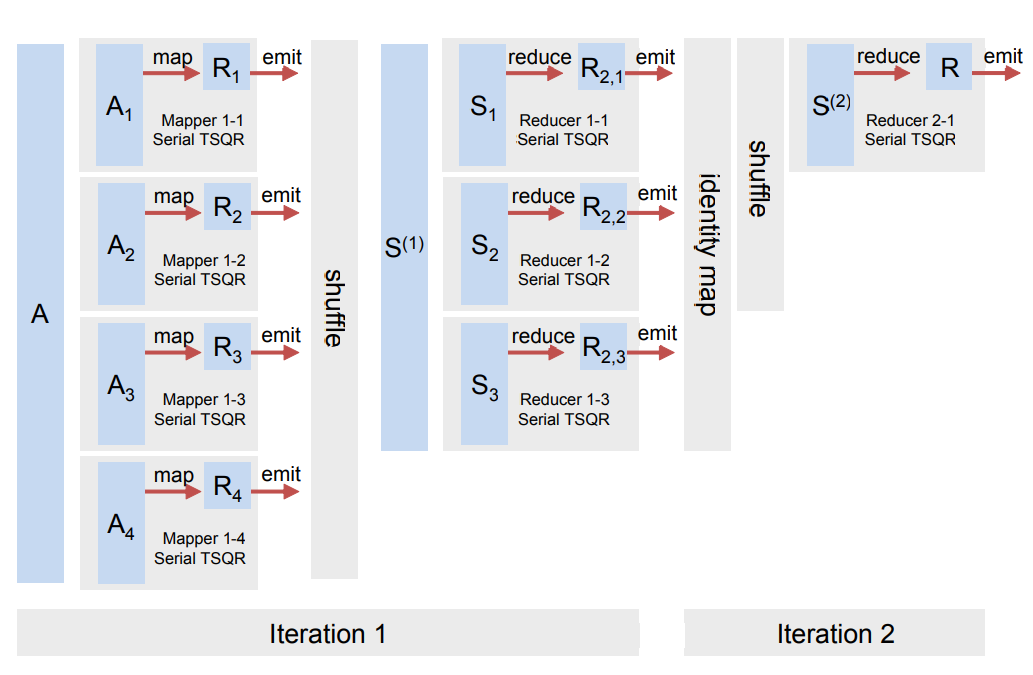
PS: 还有的文章[1]则是在任务级做出优化,将上面的数据流并行化,在MapReduce上计算。它实现了mapper(串行块),reducer(多个并行的串行块的缩并),scheduler(根据不同串行块情况分配缩并组)
Algorithm
DTQR算法是将 $\R^{m,n}$ 分解成 $Q\in\R^{m,m}$,$R\in\R^{m,n}$,实质上是把下半 $L$ 给变换约去,然后取 $R$ 的上半部分为新的 $R$ ,下图是一个示例。
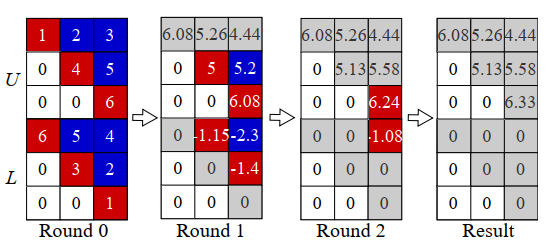
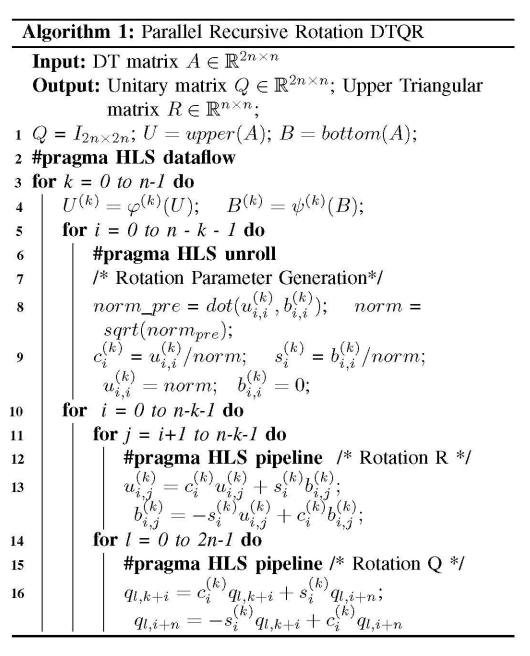
Round0时三行并行Givens运算(givens只改变一行数据),并将L矩阵对角元消除。Round1则两行并行Givens,继续消除L矩阵次对角元。这样形成了逐次远离对角线消元的pipeline顺序,而非Gaussian消元只处理一列。文献[2]提供了HLS如下图的算法(第13行有一定错误,下标少了+n)。
我们定性分析一下性能瓶颈。对于一个大矩阵来说,数据准备绝对是一个瓶颈,如果我们需要等待所有数据完毕,那么将浪费大量时间闲置,所以采用脉动阵列可以有效缓解这个问题。下面的问题是如何布置这个脉动阵列。从上面的算法可以看出,Q和R计算共用了对角元的数据,故可以放在同一列。又因为我们相当于有三个相关任务:计算旋转参数、R计算、Q计算,那么我们都可以在同一列里完成处理。横向则作为每一行的流水运行。
Acceleration Strategy
在[2]的实验部分,作者分析了性能,发现Q矩阵计算成为了新的瓶颈,并且随着矩阵增大而升高。于是,本文则针对Q矩阵的结构设计了新的数据流,提出了Global Acceleration Schemes (GS)和Partially Rotation Skipping (QS)。
GS与文章[2]相同,是上图的优化,将一些没有依赖的行计算并行化。
QS是发现Q矩阵的稀疏性,只需要将非零元素作为Q的存储内容即可。此时在下一个round需要取一列数据的时候,则在这一列没有记录的位置上补上0。如下图,我们需要更新Q矩阵的第二列和第四列,但是我们实际上只存储了四个红色的位置,为了数据排列和处理的统一性,我们补上了蓝色的0,保证两列数据输入时是完整的。同时,我们还可以重用数据到下个round。经过QS的优化,Q旋转矩阵的时间复杂度从普通矩阵乘的$O(n^2)$降到了$O(n)$。(下图Round 0 有点错误,右边蓝框应该右移一列)
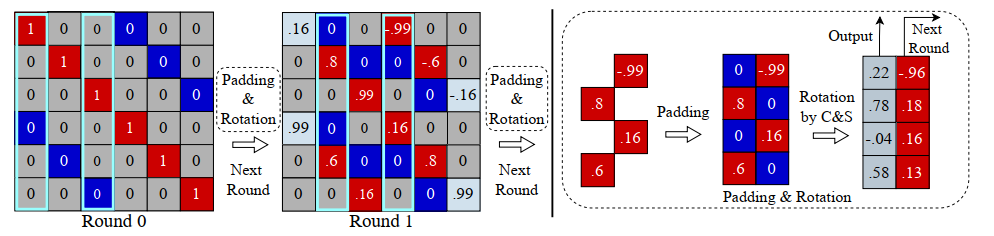
我们还发现,Q的旋转对的指标是不断趋近中心的,不过本文并没有在这方面优化存储。
经过QS优化,在实验部分可以看出,Q计算任务和R计算任务耗时就比较接近了。
Implementation
文章[2]的baseline架构实现如下图。
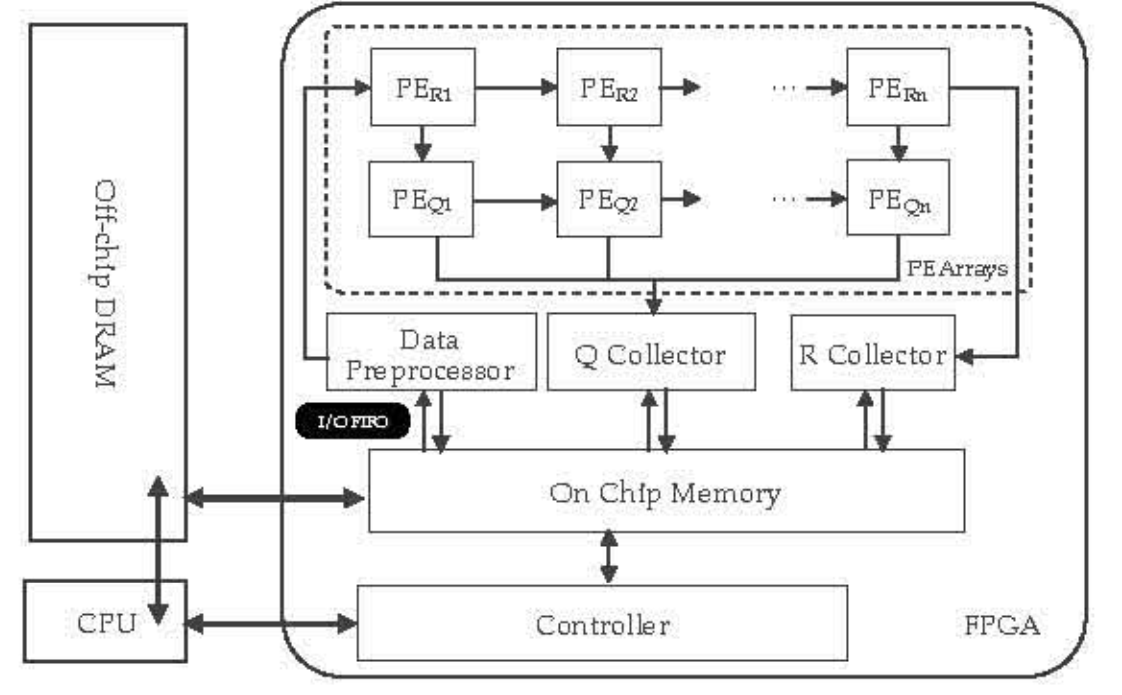
Step1:DMA from DRAM to on-chip BRAM & Data Preprocessing
数据预处理指把对角元数据存在相邻空间中,非对角元数据也可以按所取顺序排列。图中有一个FIFO queue,是指不需要等全部数据都取完就可以开始,后面的数据按顺序进入即可,因为脉动阵列允许异步数据存取。
Step2:Parallel Rotation Parameter Generation & Pipeline Rotation
由于旋转参数计算牵扯到开方和除法运算,运算资源要求远大于R矩阵的旋转部分乘加运算量,若串行则有巨大overhead。并且同一行有多个列的运算,需要在内存中取来大量数据,如果全部同时整块取来,也会在读写方面有overhead。于是,[2]作者提出了Pipeline Rotation,一次只算一行,但是却同时完成下一行的读和上一行的写,分散了同时读写的压力。在行内,采用脉动阵列,完成每一列的计算,保证数据充分复用。
Step3:Task-level Pipeline
前一个Round没结束就接着开始下一个的计算,形成任务之间的重叠。
Step4: Collect
Q collector和R collector作为数据收集器,将矩阵排列好放回Memory,或者继续前递给下一个任务。
在本文中,作者优化了计算部分,改用了1D和2D混合阵列,如下图。
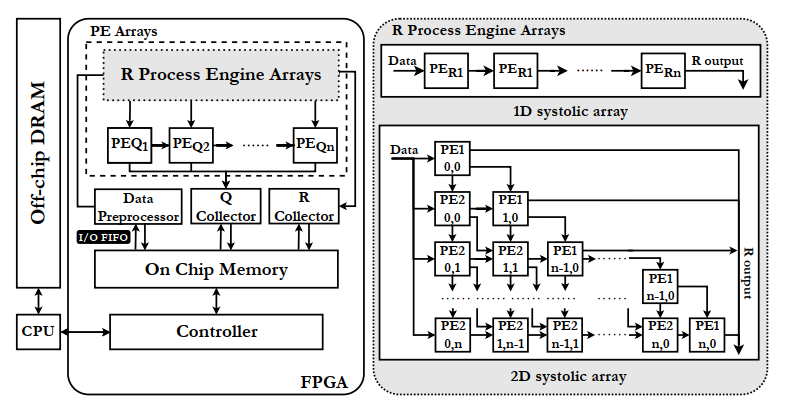
原本的1dPE是需要同时计算旋转参数生成和旋转的,现在将两种功能分离成PE1和PE2,现在PE2可以在没有算出旋转参数之前拿到数据,一旦PE1完成计算就立刻开始,这样一种分离设计减少了闲置的时间,也减少了广播的程度。同时,阵列设计成了统一的三角布置,与R的三角结构对应。(不过感觉1d的阵列里也是这样设计的,或者是更细粒度的pipeline)
Experiment
为了复现相应的微架构,我们先从模拟器复现开始。基于simpy模拟器,可以很容易的模拟事件级的仿真。
系统可以分解成如下的微部件,每个部件之间可以直接相连互相引用,目前正在按层次完成。

verilog仿真将在模拟器验证设计功能之后开始。
实验仍在进行,可以在repo链接里查看具体设计。
Comment
本文已经对QR分解做了很精细的优化了,但可以发现还有些值得改进的点:
- Q矩阵为什么不能用2D PE阵列呢?
可能作者的想法是Q矩阵有较大稀疏性,可以放在一个PE里处理完,再用2D阵列面积撑不住。但是我觉得当n的数量比较大时,这种稀疏性其实是在慢慢消失的,到最后几个PEq非零元素将占大多数,这会对单个PE造成瓶颈,上面的R算完了可能Q还没算完。
因此,我们可以采用1D 和 2D混合处理Q矩阵,即同时兼备面积考虑和效率考虑。
- 已经计算完的行能否提前退出?
从图中我们看到,第一列计算完以后,U矩阵第一行其实已经固定,不需要继续传播,可以直接走快速收集通道离开阵列,减少带宽和负载压力。
同理,Q矩阵也有可以提前退出的列,也可以先行离开。
- R是否也能利用QS优化,比如只记录上三角部分,不用记录下三角?
这个是可以实现的,比如用一些标志信号代表相应行数,免去记录下三角部分。而且我们发现,L矩阵是越来越稀疏的,这样优化也是更好的选择,可以充分利用稀疏性。
- 前递对角元
可以看到,PE2的数据有着列依赖关系,一列的数据必须等待上一列数据计算完毕以后流入,所以这一部分的时间没有办法省去。但是PE1并没有这种关系,既然PE1计算时间是最大瓶颈,为何不把对角元数据先前递到n个PE1里去,减少了大量的冗余处理时间,PE2的数据可以以1clk/col的速度处理,n个clk即可完成处理。
之后,每当前一个任务离开一列,后一个任务就能紧接着进入,提前开始旋转参数计算。
- Data preprocessor优化
按上面所说,我们应该先前递对角元,所以预处理阶段应先行输出对角元到阵列中去,之后可以慢慢收集非对角元数据。
我认为还有些任务级上可以优化的点,更好的把相邻的任务无闲置的衔接,等待上面的idea验证再说。